Navigation
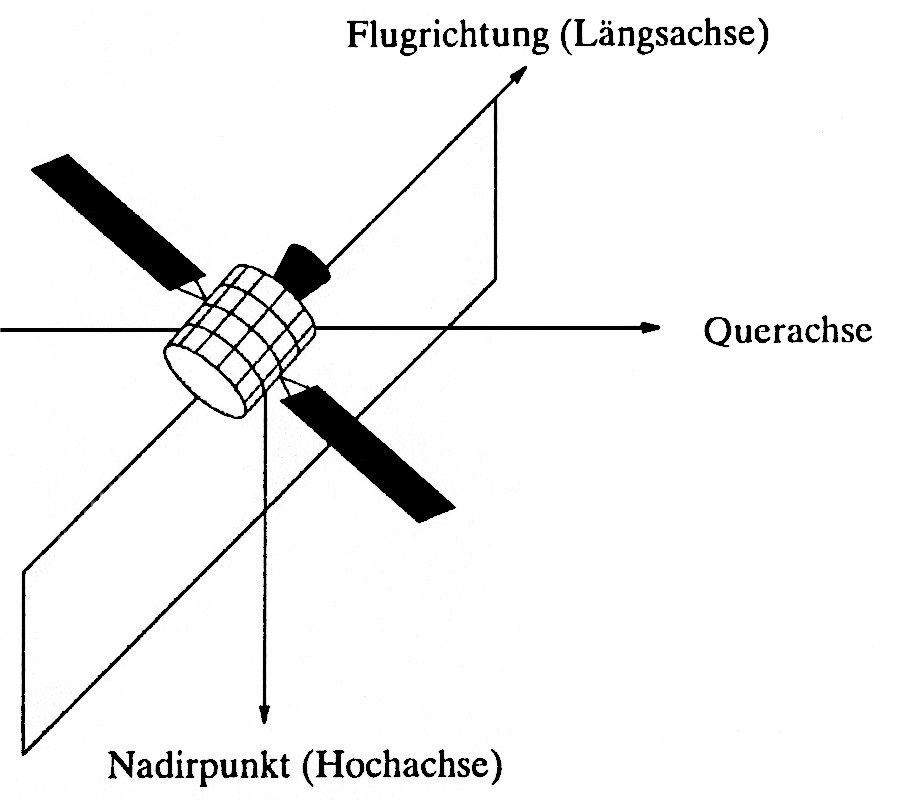
In desem Schritt wird eine virtuelle Korrektur der Plattformlagewinkel
[Längsachse (Roll), Querachse (Pitch)
und Hochachse (YAW)] durchgeführt. Dieser Prozess wird Navigation
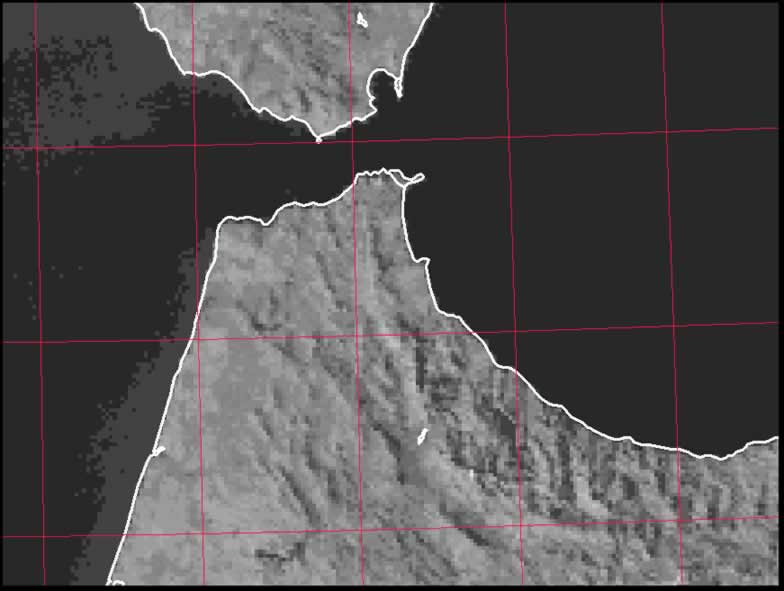
genannt. Dabei wird durch interaktives Anpassen eines auf das Satellitenbild
überlagerten Küstenliniendatensatzes [World Data Base II (WDB
II) oder Digital Chart of the World (DCW)]
mit den real auf dem Satellitenbild erkennbaren Küstenlinien angepasst.
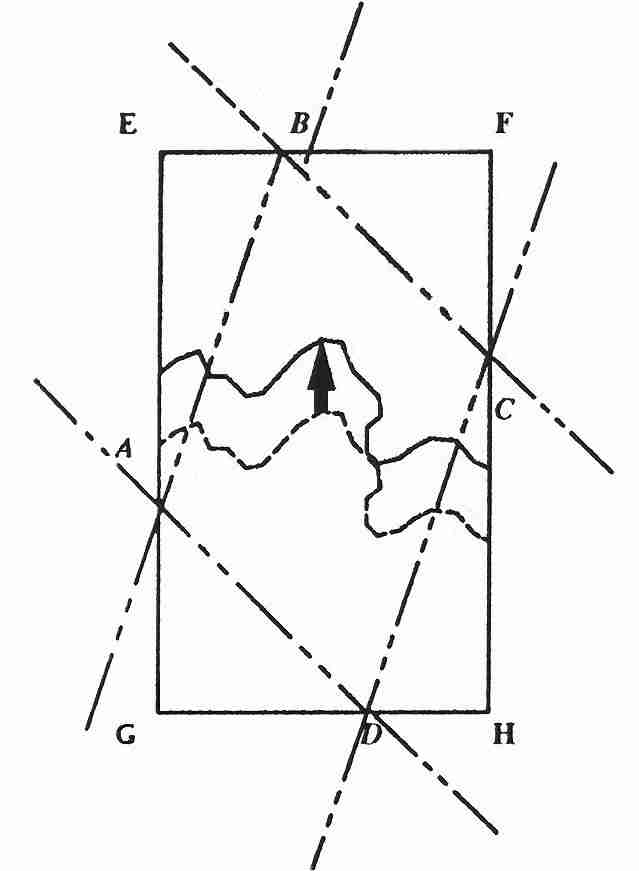
Den Navigationsvorgang läuft in fünf Schritten
ab. Zunächst werden markante Küstenlinienbereiche ausgewählt
und sogenannte Boxen darüber gelegt. Anschließend wird in
den soeben ausgewählten Boxen ein Cloudscreening-Verfahren durchgeführt,
das sich an spektralen Schwellenwert- und Nachbarschaftstest orientiert.
Die endgültige Auswahl der zur Navigation benötigten Boxen hängt
vom Bewölkungsgrad ab. Mit Hilfe des Pearson-Korrelationsverfahrens
wird der Küstenliniendatensatz genau an die Grenze zwischen Meer und
Land angepasst. Zu letzt werden die Satellitenlagewinkel und die Aufnahmezeit
aktualisiert.
Eine möglichst exakte Navigation ist die Voraussetzung
für die später durchzuführende zeitli-che Synthetisierung
des NDVI Datenmaterials. Bei optimalen Bedingungen liefert das Ver-fahren
der Navigation eine Genauigkeit von ca. 1,5 Kilometern im Subpixelbereich
und bis 2,5 Kilometern am Szenenrandbereich. Optimale Bedingungen für
die Navigation sind dann gegeben, wenn die entsprechende NOAA AVHRR Szene
möglichst wolkenfrei ist. Deswegen sind generell interaktive Nachkontrollen
nicht zu vermeiden, da der Navigationsvorgang bei Szenen mit einer zu hohen
Wolkenbedeckung abgebrochen wird.
Im nächsten Schritt wird die eigentliche Georeferenzierung
durchgeführt. Bei diesem Vorgang wird jedem Bildelement eine exakte
geographische Position zugewiesen. Wichtig sind die tagesaktuellen Bahnparameter
der NOAA-Plattform, da sie zur Georeferenzierung hinzugezogen werden und
so eine exakteres Ergebnis der Georeferenzierung ermöglichen.
In Terascan besteht die Navigation aus 2 Modulen:
1. "nabox2" und
2. "nav2"
Ersteres sucht die Boxen aus, die eine optimale Navigation benötigt. Je mehr, desto besser. In "nav2" wird der eigentlich Navigationsvorgang durchgeführt.
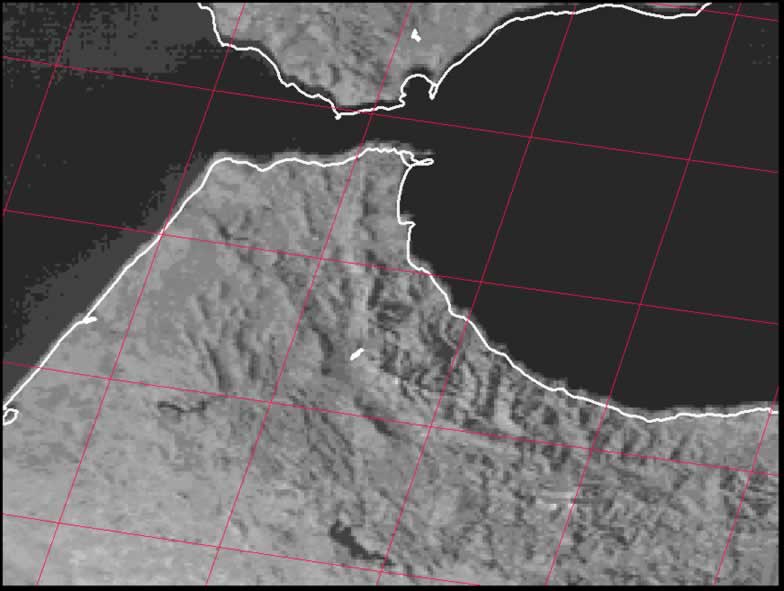
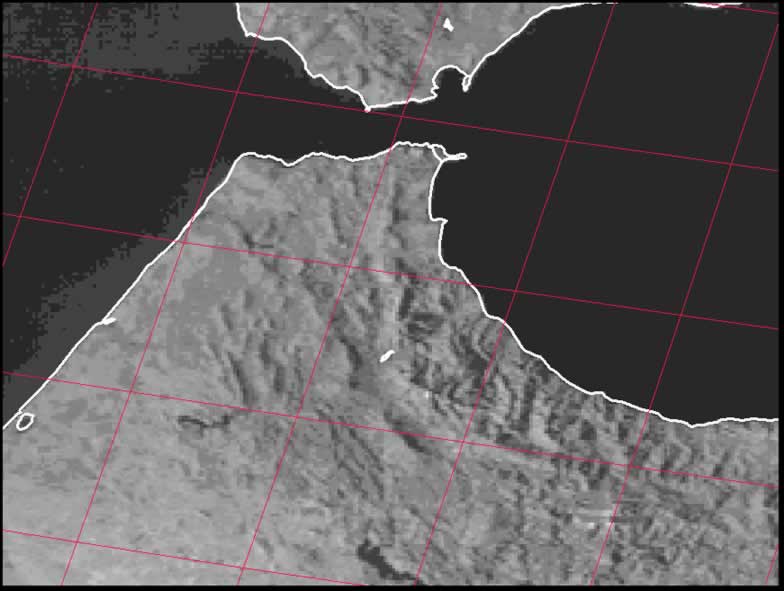
Beispiele: Vor der Navigation, nach der Navigation, nach dem navigieren und georeferenzieren.
Hilfe mit "thelp navigation", "thelp nav2" und "thelp navbox2"
http://www.seaspace.com/service/support/TeraScan_Docs/doc/man7/avhrr.html
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}